金桔
金币
威望
贡献
回帖0
精华
在线时间 小时
|
登陆有奖并可浏览互动!
您需要 登录 才可以下载或查看,没有账号?立即注册


×
hi everyone
有上一篇文章得知我们机械的设计中需要采用三步法来减小机械的风险
但很多时候通过本质安全是无法实现的,因为有时候需要考虑到机械的实用性,所以就需要通过加装安全防护装置来实现,安全防护装置就包含了控制系统这块的内容,就是除了加一些围栏之类的,有时候也是需要加一些安全元器件来监控围栏或者区域的状态。元器件就需要相对应的控制系统来控制,所以这篇我们说说怎么设计一个安全控制系统。
这个标准是根据ISO12100的规定来,这个是属于B1类的标准,属于特定安全的特征。
附机械领域安全标准的结构:
A类标准,给出机械的基本概念,设计原则和一般原则,如ISO 12100
B类标准,分为
B1,特定的安全特征,如安全距离,安全温度等,如ISO 13849,ISO 13855
B2,安全装置,如双手控制装置,联锁装置,如ISO 14119
C类标准 ,对一种特定的机器规定详细的安全要求,例如注塑机安全要求。
华丽分割线
<hr/>本文分为12部分
1.范围,本标准适用于所有种类机械的控制系统的特征
2.引用的文件
3.术语和定义, 以下是主要的一些术语,有些字面可以理解的就不重复了
3.1 类别 ,安全相关的部件的分类,通过结构布置,故障检测或部件可靠性来达到
3.2 故障 ,产品不能完成要求功能的状态,如电机短路了,不能旋转了
3.3 失效, 产品的功能的能力中断,如电机正在转的时候,突然没有电了。
3.4 危险失效,是控制系统可能处于危险状态的失效,如要停电机,但是停不了
3.5共因失效,由单一事件引起的不同产品的失效,如由于断路器故障,使电机不能停止,导致危险。所以只能算单一的故障。
3.6系统性失效,与某个原因必然相关,
3.7 抑制,安全功能临时性的自动暂停,如类似暂时屏蔽该安全功能
3.8 平均危险失效间隔(MTTFd),平均危险失效间隔时间期望,
3.9 诊断覆盖率(DC),诊断有效性的度量,
3.10 完全完整性等级(SIL), 一种离散的等级,安全功能的安全完整性要求。
3.11 有限可变语言(LVL),能够结合定义和专用函数库来实现安全要求的一种语言
3.12全可变语言(FVL),能够实现多样功能和应用的一种语言
3.13 经使用证明,以针对一个组件的特定配置既往运行的分析为基础,证明危险系统性失效的可能性足够低,以致使用的元件的安全功能能达到所需要性能等级
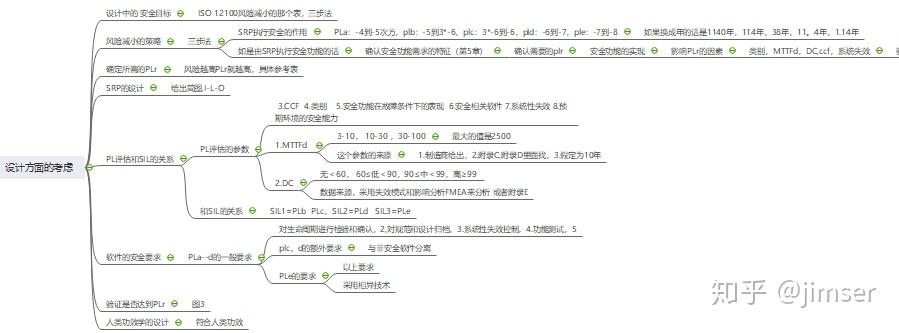
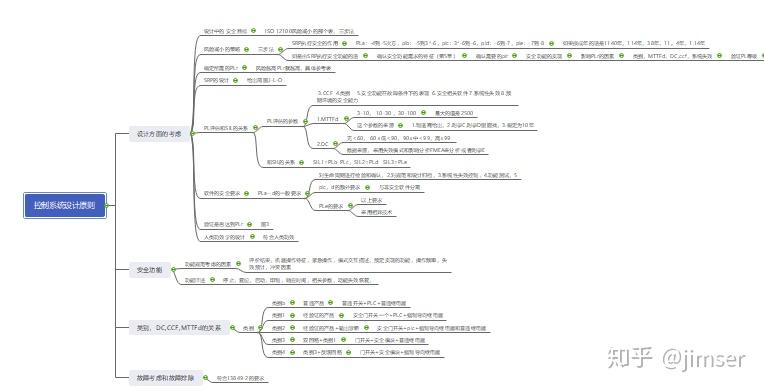
4.设计方面的考虑
主要是以下几大方面的考虑,
4.1设计的安全目标
4.2风险减小的策略
4.3确认所需要的PLr
4.4控制系统的设计
4.5 PL的评估
4.6软件的安全要求 ce
4.7验证PL
4.8人体功效学的设计
具体的内容参考以下图:
5.安全功能

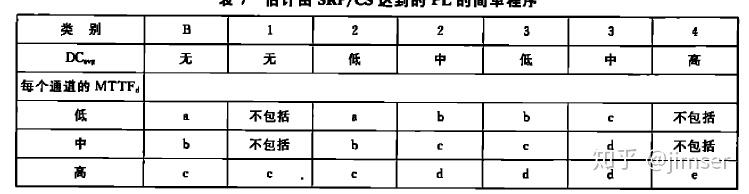
6.类别和DC,MTTFd,CCF的关系,参考下图:
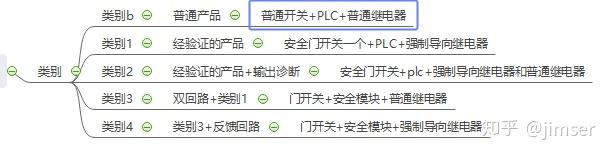
类别的分类举例图:
7.故障考虑和故障排除,符合ISO 13849-2的标准
8.确认,详细要去符合ISO 13849-2,
9.维护,符合ISO 12100 的6.2.7中提到的原则,内容在ISO 12100,6.4.5.1.e里面,具体见下图:
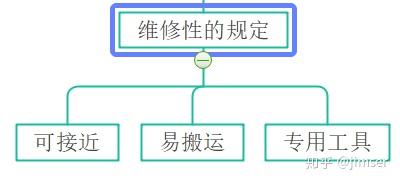
维护的原则

维护的信息
10.技术文件,需要对安全相关的部件进行归档
10.1 控制系统提供的安全功能
10.2 每种安全功能的特征
10.3 安全相关部件确切的起始点和终止点
10.4 环境条件
10.5 性能等级(PL)
10.6所选的类别
10.7与可靠性相关的参数,MTTFd,DC,CCF 和任务时间
10.8 防止系统性失效的措施
10.9 所使用的技术
10.10 所使用的技术
10.11 考虑所有与安全相关的故障
10.12 故障排除的理由
10.13设计原理
10.14软件文件
10.15防止可预见的误用措施
但文件是为制造商内部使用,不用给到用户处
11,使用信息,应向使用者提供安全使用控制系统的重要信息,
12.附录部分
附录A,评定PLr的图表
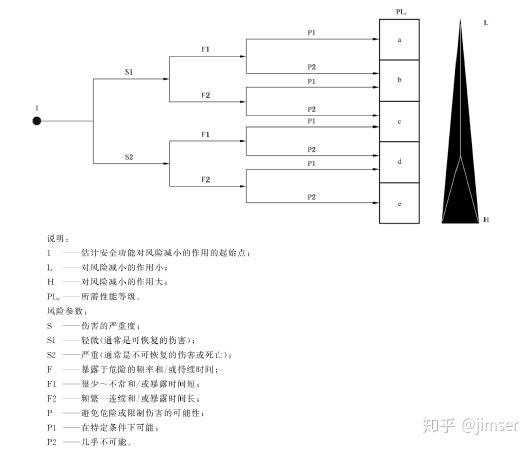
例如数控车床在上下料的地方安全功能的要求:
选着S2-----F2-----P2,选出来是PLr=PLe
由于C类标准(GB 15760)中规定订所需要的类别,最高的识别1或者2,所以
再根据类别的表格,类别2的pLe最高可以到达PLd,所以最高的PLr=PLd就行,

GB 15760
这个也是要说的,当B类标准和C类标准有冲突的时候,选择C类的就行。
附录B 模块法和安全相关模块图
附录C MTTFd值的估算,由于不是所有的元件都有MTTFd这个值,特别是输出元件,例如电磁阀,这个MTTFd怎么估算呢,这个给出了表格。
附录D 计算通道中的MTTFd的简化方式
附录E DC值的估计
还其他的附录
END
附结构图:
原文地址:https://zhuanlan.zhihu.com/p/111548821 |
|

 /3
/3 

 浙公网安备33010802005999号
浙公网安备33010802005999号 


 2026庆【网站十三周
2026庆【网站十三周 2025庆【网站十二周
2025庆【网站十二周 2024庆中秋、迎国庆
2024庆中秋、迎国庆 2024庆【网站十一周
2024庆【网站十一周 2023庆【网站十周年
2023庆【网站十周年 2022庆【网站九周年
2022庆【网站九周年

 雷达卡
雷达卡 发表于 2025-3-6 10:35
发表于 2025-3-6 10:35
 提升卡
提升卡


